











Loại key:
Số lượng:
Giá: ₫











Canbus là một thiết bị có chức năng giải mã đã được vô hiệu hóa lỗi các tín hiệu. Chúng đã được mã hoá bởi một hệ thống cảm biến xử lý có tên là ECU. Mỗi hàng xe sẽ có những ECU phù hợp với dòng sản phẩm của mình. Nó dùng để quản lý và điều khiển mọi hoạt động của các thiết bị trên xe. Nhờ vào việc tích hợp các tính năng thông minh giúp quy trình kiểm tra và sửa chữa dễ dàng và nhanh chóng hơn.
Can Bus có tên tiếng anh là Controller Area Network. Nó là một giao thức được thiết kế trong bộ điều khiển điện tử trên các dòng xe ô tô. Tất cả các thiết bị trên xe sẽ giao tiếp với nhau trong môi trường nhiều nhiễu điện. Chúng đều nhận được tin nhắn hoặc “khung” mà không yêu cầu máy tính chủ. CAN được hoạt động theo đúng tiêu chuẩn quốc tế ISO 11898.

Điều khiển ghế tự động thông qua các nút bấm
Ngoài CAN Bus 2.0 truyền thống, trên thị trường hiện nay còn xuất hiện một khái niệm mới, đó là CAN FD. Đây là phiên bản “Dữ liệu linh hoạt (Tốc độ)” của CAN Bus. Độ dài tiêu chuẩn của mỗi tin nhắn đã được tăng 800%, từ 8 lên 64 byte và tốc độ dữ liệu tối đa cũng được tăng tương tự từ 1 Mbps lên 8 Mbps.
Phần “linh hoạt” đề cập là các ECU có thể tự động thay đổi tốc độ truyền. Nó sẽ chọn kích thước bản tin lớn hơn hoặc nhỏ hơn. Tất cả sẽ dựa trên nhu cầu của chúng theo thời gian thực. Xét về tính thực tế thì CAN FD vẫn hoàn toàn tương thích ngược với tiêu chuẩn CAN 2.0. Ngày nay, CAN FD được tìm thấy trong các phương tiện hiệu suất rất cao. Theo dự báo của các chuyên gia thì nó sẽ có mặt trên tất cả các phương tiện trong một vài năm tới.
Khi bạn bấm một công tắc trong nhà để bật đèn, dòng điện sẽ chạy qua công tắc để đến đèn. Các công tắc và hệ thống dây điện cần phải đủ nặng và đủ cách điện để xử lý dòng điện dự kiến tối đa. Các bức tường của ngôi nhà cũng phải được lấp đầy hệ thống dây điện với tính năng cách nhiệt này.
Ô tô và xe tải từng được đi dây giống hệt nhau. Đầu tiên là vào 1915, khi Henry Ford có ý tưởng lắp thêm đèn và còi điện vào ô tô. Cụ thể là lắp dòng điện chạy từ pin qua công tắc đến đèn và các thiết bị khác. Vào những năm 1960, có hàng ngàn dây điện nặng chạy khắp mọi phương tiện. Mỗi một trọng lượng tăng thêm sẽ làm giảm hiệu quả sử dụng nhiên liệu của xe.
Sau lệnh cấm vận dầu mỏ vào những năm 1970, áp lực ngày càng tăng đối với các nhà sản xuất ô tô trong việc cải thiện hiệu suất sử dụng nhiên liệu của họ. Vì vậy, họ bắt đầu tìm cách giảm trọng lượng của những chiếc xe mà họ đang chế tạo.
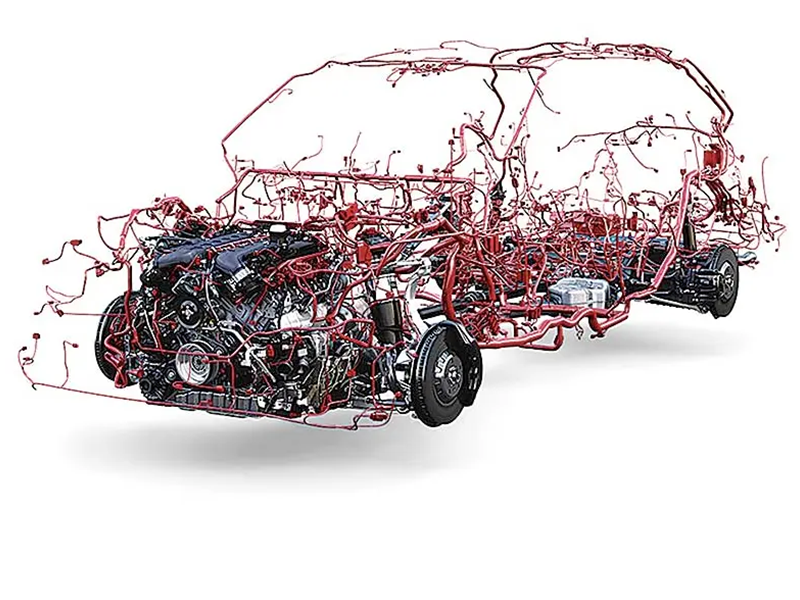
Chiếc xe ô tô khi chưa trang bị can bus
Vào đầu những năm 1980, ô tô ngày càng có nhiều ECU (bộ điều khiển điện tử) bên trong. Các công ty lớn như công ty Robert Bosch của Đức cũng tìm kiếm một loại hệ thống thông tin liên lạc Bus. Mục đích chính là muốn được sử dụng như một hệ thống liên lạc giữa nhiều ECU và hệ thống trên xe. Họ đã tìm kiếm trên thị trường nhưng không thể tìm thấy chính xác thứ họ cần. Vì vậy họ bắt đầu phát triển “Controller Area Network” với sự hợp tác của nhà sản xuất ô tô Mercedes-Benz và nhà sản xuất chất bán dẫn Intel®, cùng một số trường đại học ở Đức.
Năm 1986, Bosch giới thiệu tiêu chuẩn CAN tại Đại hội SAE ở Detroit. Một năm sau, Tập đoàn Intel bắt đầu xuất xưởng những con chip điều khiển CAN đầu tiên. Thế giới ô tô cũng từ đó có nhiều sự thay đổi. Nhìn lại, việc tiết kiệm được trọng lượng do sự phát triển của CAN gần như là một sản phẩm phụ may mắn, nhưng đầy tính thực tế.
Tiêu chuẩn CAN Bus được chấp nhận sử dụng rộng rãi. Nó được ứng dụng trong thực tế trên tất cả các phương tiện và nhiều loại máy móc. Dưới đây là những lợi ích CAN Bus mang lại.
Các ECU giao tiếp thông qua một hệ thống CAN duy nhất. Thay vì thông qua các đường tín hiệu tương tự phức tạp trực tiếp – giảm sai số, trọng lượng, hệ thống dây điện và chi phí. Các chip CAN luôn có sẵn và giá cả phải chăng.
CAN Bus cung cấp một điểm vào để giao tiếp với tất cả các ECU. Qua đó cho phép chẩn đoán, ghi dữ liệu và cấu hình.
Hệ thống CAN bus hoạt động rất đáng tin cậy trong môi trường nhiễu điện và nhiễu điện từ. Đây là lựa chọn lý tưởng cho các ứng dụng quan trọng về an toàn. Điều này thể hiện rõ trong các phương tiện xe ô tô khi cùng lưu thông trên đường.
Khung CAN được ưu tiên bởi số ID. Dữ liệu ưu tiên hàng đầu được truy cập Bus ngay lập tức mà không gây gián đoạn các khung khác.
Can Bus đã loại bỏ hàng km dây điện. Từ đó loại bỏ trọng lượng bản thân của chúng khỏi xe.
CAN bus hoàn toàn dễ dàng triển khai trên nhiều loại xe. Nó đã đạt tiêu chuẩn với hệ sinh thái hỗ trợ phong phú.
Điều này làm cho CAN trở nên lý tưởng cho các ứng dụng quan trọng trong xe cộ. CAN có khả năng kiểm soát và phát hiện lỗi tuyệt vời. Việc phát hiện lỗi dễ dàng được thực hiện và do đó dữ liệu được truyền sẽ đến được nơi cần đến.
Nó là một giao thức lý tưởng khi yêu cầu kiểm soát một hệ thống phức tạp. Nó làm giảm hệ thống dây điện nặng nề. Do đó giảm chi phí và trọng lượng. Chi phí của chip thấp và việc triển khai CAN tương đối dễ dàng do giao thức được thiết kế rõ ràng.
Một lợi thế khác khi sử dụng CAN là hai lớp đầu tiên: lớp vật lý và lớp liên kết dữ liệu, được thực hiện bên trong các vi mạch rẻ tiền, có sẵn.
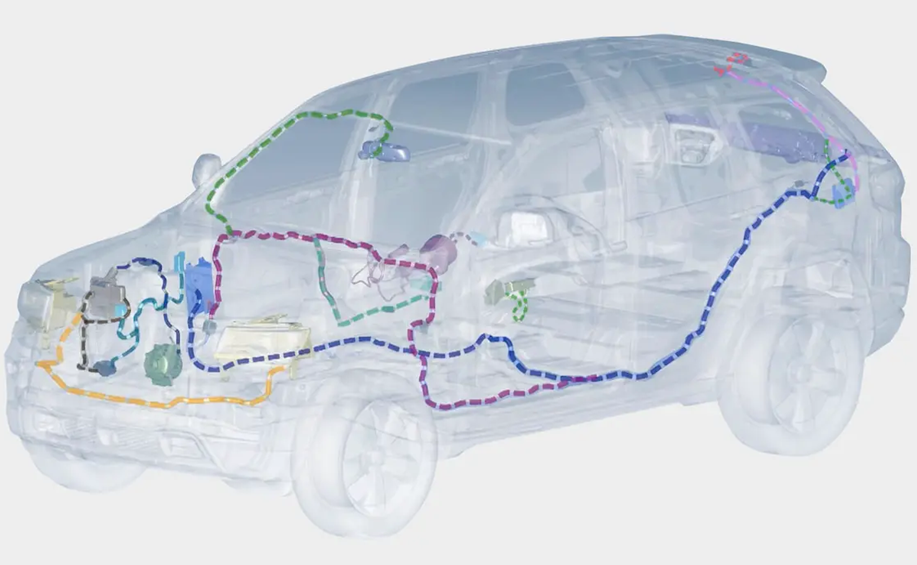
Hệ thống dây CAN trang bị trên ô tô
Ngày nay, các ứng dụng CAN đang được thống trị bởi thế giới ô tô và xe có động cơ. Hơn hết CAN còn được tìm thấy trên hầu hết mọi ngành. Bạn có thể tìm thấy giao thức CAN đang được sử dụng trong:
Các thiết bị trên CAN Bus được gọi là “Nút CAN”. Mỗi nút bao gồm một bộ xử lý (MCU), bộ điều khiển CAN và một bộ thu phát. Bộ thu phát này sẽ điều chỉnh các mức tín hiệu của cả dữ liệu được gửi và nhận bởi nút. Tất cả các nút có thể gửi và nhận dữ liệu, nhưng không phải cùng một lúc.
Các nút không thể gửi dữ liệu trực tiếp cho nhau. Thay vào đó, họ gửi dữ liệu của họ lên mạng, nơi nó có sẵn cho bất kỳ nút nào mà nó đã được giải quyết. Giao thức CAN là không mất dữ liệu, sử dụng phương pháp phân xử bitwise để giải quyết nội dung trên Bus.
Tất cả các nút được đồng bộ hóa để chúng lấy mẫu dữ liệu đồng thời trên mạng. Tuy nhiên, dữ liệu không được truyền cùng với dữ liệu đồng hồ (thời gian). Vì vậy CAN không thực sự là một bus đồng bộ.
Với CAN, tất cả dữ liệu được gửi trong khung và có bốn loại:
Hiện có hai biến thể của độ dài tin nhắn: tiêu chuẩn và mở rộng. Sự khác biệt thực sự là mã định danh 18 bit bổ sung trong trường phân xử.
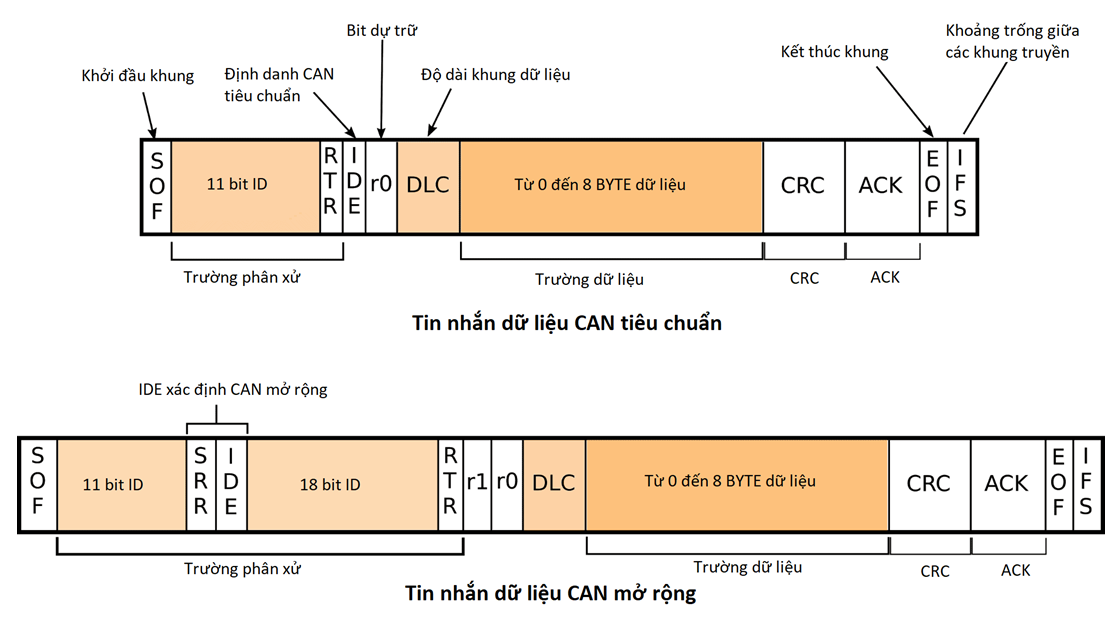
Cấu trúc tin nhắn CAN
Nếu nhiều nút truyền cùng lúc, chúng sẽ bắt đầu phân xử đồng thời. Nút có số ID tin nhắn thấp nhất sẽ được ưu tiên. Các bit trội ghi đè lên các bit lặn trên bus CAN.
Mã nhận dạng thông báo có thể là 11 bit (CAN tiêu chuẩn, 2048 mã nhận dạng thông báo khác nhau). Hoặc 29 bit (CAN mở rộng, 537 triệu mã nhận dạng thông báo khác nhau). Bit yêu cầu truyền từ xa chiếm ưu thế và chỉ ra rằng dữ liệu đang được truyền.
Trong hầu hết các hệ thống, lôgic 1 đại diện cho mức cao và lôgic 0 đại diện cho mức thấp. Nhưng trên Bus CAN thì khác. Vì vậy thường sử dụng bộ điều khiển vào ra ở trạng thái mặc định được kéo lên điện áp nguồn. Trong đó, các thiết bị ở trạng thái mặc định là nhận tín hiệu trạng thái Bus.
Tiêu chuẩn ISO 11898 là tiêu chuẩn định nghĩa cho một số phiên bản của CAN. Các loại CAN thống trị được sử dụng trong ngành công nghiệp ô tô là:
Biến thể này được sử dụng cho các hệ thống chịu lỗi không yêu cầu tốc độ cập nhật cao. Tốc độ truyền dữ liệu tối đa là 125 kbps. Nhưng hệ thống dây dẫn tiết kiệm hơn CAN tốc độ cao. Trong các ứng dụng ô tô, CAN tốc độ thấp được sử dụng để chẩn đoán, điều khiển và hiển thị bảng điều khiển, cửa sổ điện.
Biến thể này được sử dụng để liên lạc giữa các hệ thống quan trọng yêu cầu tốc độ cập nhật cao và độ chính xác dữ liệu cao. Ví dụ: hệ thống chống bó cứng phanh, kiểm soát ổn định điện tử, túi khí, bộ điều khiển động cơ… Tốc độ truyền dữ liệu của CAN tốc độ cao dao động từ 1 kbit đến 1 Mbit mỗi giây.
CAN tốc độ cao nhanh hơn tốc độ thấp, nhưng yêu cầu băng thông của các ứng dụng ô tô mới đang tăng lên hàng năm. Vì vậy các nhà máy cung cấp OEM cho phụ kiện ô tô hiện đang cài đặt CAN FD vào ô tô mới. CAN FD đã được ca tụng là “CAN on steroids.”
Phiên bản mới nhất của CAN giới thiệu tốc độ dữ liệu linh hoạt, nhiều dữ liệu hơn cho mỗi tin nhắn và tốc độ truyền cao hơn nhiều. Độ dài dữ liệu trong mỗi thông báo CAN tiêu chuẩn (tốc độ thấp và tốc độ cao) là 8 byte. Nhưng với CAN FD, con số này đã được tăng 800% lên 64 byte dữ liệu. Ngoài ra, tốc độ dữ liệu tối đa cũng đã được tăng lên đáng kể từ 1 Mbps lên 8 Mbps.
CAN FD cũng tương thích ngược và hỗ trợ giao thức truyền thông CAN 2.0 cũng như các giao thức đặc biệt như SAE J1939. Trong đó CAN out được sử dụng dưới dạng chỉ đọc. CAN FD về cơ bản là một phần mở rộng của tiêu chuẩn CAN ban đầu như được quy định trong ISO 11898-1. Và nó hoàn toàn tương thích với các hệ thống CAN cổ điển.
CAN FD là một bước tiến quan trọng. Nó cho phép các ECU tự động thay đổi tốc độ truyền và chọn kích thước bản tin lớn hơn hoặc nhỏ hơn, dựa trên yêu cầu thời gian thực. Nó hiện đã được tìm thấy trong các loại xe hiệu suất cao. Nhưng khi hiệu suất ECU tăng lên và chi phí phần cứng CAN FD giảm xuống thì chỉ còn là vấn đề thời gian trước khi CAN FD có mặt trên hầu hết các loại xe.
Tại sao chúng ta cần các tiêu chuẩn và giao thức bổ sung “trên đỉnh” của CAN? Đơn giản là vì CAN là một giao thức gọn nhẹ và đáng tin cậy, đó thực sự là tất cả. Nó là một hệ thống nhắn tin, nhưng nó không bao gồm bất kỳ cách nào để phân tích hoặc hiểu dữ liệu trong các tin nhắn. Đây là lý do tại sao một số công ty đã tạo ra các tiêu chuẩn và giao thức bổ sung chạy bên trong hoặc bên trên CAN, cung cấp các chức năng bổ sung. Những điều được biết đến nhiều nhất trong số này bao gồm:
Giao thức SAE J1939 ban đầu được phát triển để sử dụng cho xe tải hạng nặng và giàn máy kéo ở Hoa Kỳ. Ngày nay nó được sử dụng bởi các nhà sản xuất động cơ diesel trên toàn thế giới. J1939 là một giao thức cấp cao hơn chạy trên lớp vật lý CAN. Nó cung cấp một số chức năng hữu ích dành riêng cho xe tải hạng nặng như xe tải 18 bánh.
Giao thức này có một số giới hạn đã được cố ý đưa ra để tăng độ tin cậy cao nhất có thể. Bao gồm giới hạn mã nhận dạng thông báo ở mức 29-bit và giới hạn tốc độ bus ở 250 hoặc 500 kbps.
Cổng chẩn đoán tích hợp này được tìm thấy trong tất cả các xe ô tô được sản xuất từ năm 1989. Thường nằm trong phạm vi 2 feet (0,61 mét) của vô lăng. Đó là một giao diện cho phép các cửa hàng sửa chữa ô tô cũng như chủ xe chẩn đoán các vấn đề của xe bằng cách kết nối quét công cụ vào đầu nối 16 chân của nó.
Các công cụ quét có thể đọc DTC (mã sự cố chẩn đoán) do xe báo cáo. Các giao diện OBD II là cần thiết để thực hiện hàng chục kênh dữ liệu thời gian thực. Chẳng hạn như RPM, tốc độ xe, nhiệt độ nước làm mát, và nhiều hơn nữa.
Các phổ Đo lường và hiệu chuẩn Nghị định thư ( XCP ) được thiết kế để kết nối với các hệ thống ECU hiệu chỉnh. “Universal” trong tên gọi của nó đề cập đến thực tế là nó có thể chạy trên CAN bus, CAN FD, FlexRay, Ethernet. Nó là sự kế thừa của Giao thức Hiệu chuẩn CAN (CCP) ban đầu được phát triển vào những năm 1990.
CANopen là một giao thức lớp cao hơn được sử dụng cho các ứng dụng điều khiển nhúng. Bởi vì nó dựa trên giao thức nhắn tin CAN, các hệ thống DAQ và bộ ghi dữ liệu có thể đọc và ghi dữ liệu CAN cũng có thể truy cập dữ liệu từ CANopen.
CANopen được phát minh để cung cấp khả năng tương tác dễ dàng giữa các thiết bị trong hệ thống điều khiển chuyển động. Giao tiếp giữa và giữa các thiết bị được thực hiện ở mức cao và cấu hình thiết bị cũng được hỗ trợ. Nó được sử dụng nhiều trong các ứng dụng điều khiển chuyển động, robot và điều khiển động cơ.
CANopen được quản lý bởi tổ chức quốc tế CAN in Automation – CiA . Được thành lập tại Đức vào năm 1992, CiA là một nhóm người dùng / nhà sản xuất quốc tế phi lợi nhuận cho CAN. Họ tự hào là một nền tảng không thiên vị cho sự phát triển của giao thức CAN và để quảng bá hình ảnh của công nghệ CAN.
CANopen cung cấp một số khái niệm bổ sung, bao gồm:
Ngoài CAN và các giao thức chạy trên nó được mô tả trong các phần trước, còn có các bus truyền thông khác được sử dụng cho các ứng dụng trên xe:
Các phương tiện hiện đại ngày nay sử dụng kết hợp nhiều bus dữ liệu. Chúng ta hãy xem xét từng cái này và xem chúng so với xe buýt CAN như thế nào?
Mọi người đều mong đợi chiếc xe mới của họ có một hệ thống giải trí tốt hơn, nhiều khả năng hơn chiếc xe trước của họ. Đài AM / FM kiểu cũ là tiêu chuẩn trong hơn 50 năm đã được chuyển đổi để chấp nhận phương tiện di động, từ ngày xưa của băng cassette và băng 8 rãnh sang đĩa compact (CD) và phương tiện flash rời.
Hệ thống truyền tải Media ( MOST ) là một Bus tiêu chuẩn được sử dụng để kết nối các hệ thống thông tin và giải trí trên xe. Nó được phát triển bởi sự hợp tác của các nhà sản xuất ô tô được gọi là MOST Cooperation. Nó cung cấp tốc độ dữ liệu 25, 50 và 150 Mb/s.
MOST được sử dụng trong hầu hết các thương hiệu xe hơi trên toàn thế giới. Có thể kết nối tối đa 64 thiết bị với mạng vòng MOST. Nó cho phép các thiết bị được kết nối hoặc ngắt kết nối một cách dễ dàng. Các cấu trúc liên kết khác cũng có thể có, bao gồm cả các ngôi sao ảo. Hiện có nhiều phiên bản MOST khác nhau, bao gồm:
Các công nghệ mới như hỗ trợ người lái và các chức năng của xe tự lái càng được hoạt động nhiều. Nhu cầu về tốc độ, cùng với chi phí thấp của phần cứng Ethernet. Đây là một yếu tố quan trọng trong việc thúc đẩy Ethernet ô tô giữa các nhà sản xuất ô tô. Các động lực khác cho ethernet ô tô bao gồm tốc độ truyền tải cần thiết cho LIDAR và các cảm biến khác. Như: dữ liệu camera thô, dữ liệu GPS, dữ liệu bản đồ và màn hình phẳng có độ phân giải ngày càng cao.
Nó không giống như môi trường gia đình và văn phòng thoải mái của chúng ta, một chiếc xe phải chịu nhiều nhiệt độ, chấn động và rung động liên tục. Ngoài ra, có EMI và RFI phải được chặn để dữ liệu quan trọng không bị can thiệp. Đặc biệt là những dữ liệu liên quan đến hỗ trợ lái xe và tránh va chạm.
Thuật ngữ “Ethernet ô tô” không đề cập đến một tiêu chuẩn cụ thể. Nó bao gồm bất kỳ mạng dựa trên Ethernet nào được sử dụng trong xe.
Những năm gần đây ethernet chỉ được sử dụng cho các ứng dụng chẩn đoán trên ô tô. Hay nói cách khác là khi ô tô đang được bảo dưỡng vkhông di chuyển. Tại sao? Do tính nhạy cảm với EMI (nhiễu điện từ) và RFI (nhiễu tần số vô tuyến), thiếu đồng bộ hóa thời gian xác định vốn có và dễ bị hỏng đầu nối do rung động.
Tuy nhiên, những vấn đề này đang được giải quyết bởi các nhóm làm việc IEEE 802.3 và 802.1. Trong khi đó, nhà sản xuất chip Broadcom đã phát triển BroadR-Reach. Sau đó dùng nó để ứng dụng công nghệ Ethernet trên ô tô. BroadR-Reach cung cấp tốc độ 100 Mb / giây bằng cách sử dụng cáp xoắn đôi không được che chắn lên đến 15 mét hoặc lên đến 40 mét khi một tấm chắn được thêm vào cáp.
BroadR-Reach đã được một số nhà sản xuất ô tô áp dụng cho các hệ thống thông tin giải trí, hỗ trợ lái xe, chẩn đoán trên xe và thậm chí cả các ứng dụng ADAS. Nó cung cấp tốc độ dữ liệu 100 Mbps trên mỗi cổng, cao hơn nhiều so với tốc độ tổng hợp 150 Mbps của MOST. Cụ thể là các trường hợp sau:
Là một phần mở rộng của Ethernet AVB. TSN tập trung vào loại đồng bộ hóa thời gian, lập lịch và định hình gói cần thiết cho các ứng dụng xe tự lái. Vì TSN là tất cả về “thời gian”, Giao thức Thời gian Chính xác (PTP) IEEE 802.1AS và IEEE 802.1ASRev. Nó đã được chọn để cung cấp khái niệm thời gian được chia sẻ trên các thiết bị.
SENT SAE-J2716 (Single Edge Nibble Transmission) được thiết kế để trở thành một giao thức chi phí thấp thay thế cho CAN hoặc LIN. Đó là một giao thức truyền một chiều cho phép các cảm biến gửi dữ liệu của chúng đến ECU.
Dữ liệu được mã hóa bằng cách sử dụng điều chế mã xung (PCM) và được truyền trên một dây duy nhất. Tổng cộng có ba dây: tín hiệu, nối đất và nguồn. Dữ liệu được mã hóa ở dạng “nibbles” 4 bit.
Một thông báo SENT điển hình là 32 bit (8 nibbles), bao gồm:
Cũng có thể cấu hình thông báo 20 bit (5 nibbles), trong đó dữ liệu chỉ là 12 bit (3 nibbles).
Do thiết kế dữ liệu được điều chế, SENT lý tưởng để sử dụng trong môi trường nhiễu về điện.
FlexRAY là một giao thức được sử dụng cho các ứng dụng ô tô động như điều khiển khung gầm. Nó được tạo ra vào năm 2005 bởi FlexRAY Consortium nhưng kể từ đó đã được tiêu chuẩn hóa theo ISO 17458-1 đến 17458-5.
FlexRAY truyền dữ liệu qua một hoặc hai cáp xoắn đôi, không được che chắn. Nó chạy ở tốc độ 10 Mbps và hỗ trợ cấu hình một hoặc hai dây. Các cấu trúc liên kết mạng bus, star và hybrid được hỗ trợ, với tốc độ lên đến 10 Mbps. Tín hiệu vi sai giữ cho nhiễu ở mức thấp mà không cần cáp che chắn, làm tăng thêm chi phí và trọng lượng.
Như với CAN, chỉ một nút có thể ghi vào bus FlexRAY cùng một lúc. CAN sử dụng một bit phân xử để xác định dữ liệu nào được ưu tiên và được phép tiếp tục. Mặt khác, FlexRAY sử dụng phương pháp Đa truy cập phân chia theo thời gian (TDMA).
Trong đó mỗi nút được đồng bộ hóa theo thời gian phải đợi đến lượt gửi thông báo. Điều này tránh va chạm và cho phép thông lượng dữ liệu tổng thể cao hơn trên xe buýt do tốc độ dữ liệu tổng thể của xe buýt cao.
FlexRAY thường được triển khai trong cấu trúc liên kết Multi-Drop cổ điển được chia sẻ bởi LIN và CAN. Tuy nhiên, nó cũng có thể được định cấu hình trong cấu trúc liên kết hình sao. Cấu trúc liên kết hình sao có ưu điểm là không cho phép một lỗi dây dẫn ảnh hưởng đến nhiều hơn một nút. FlexRAY cũng có thể được thực hiện trong một cấu trúc liên kết hỗn hợp.
FlexRAY được sử dụng thường xuyên nhất cho các ứng dụng điều khiển khung gầm chủ động, an toàn và hệ thống truyền lực hiệu suất cao. FlexRAY đắt hơn việc triển khai CAN bus.
Tuy nhiên, khi các cặp đường dữ liệu song song kép được sử dụng, điều này cung cấp khả năng dự phòng: khi một đường bị hỏng, đường thứ hai có thể tiếp quản. Điều này rất quan trọng trong các ứng dụng quan trọng như lái và phanh. Các ứng dụng FlexRAY không quan trọng về sứ mệnh thường sử dụng một cặp xoắn duy nhất.
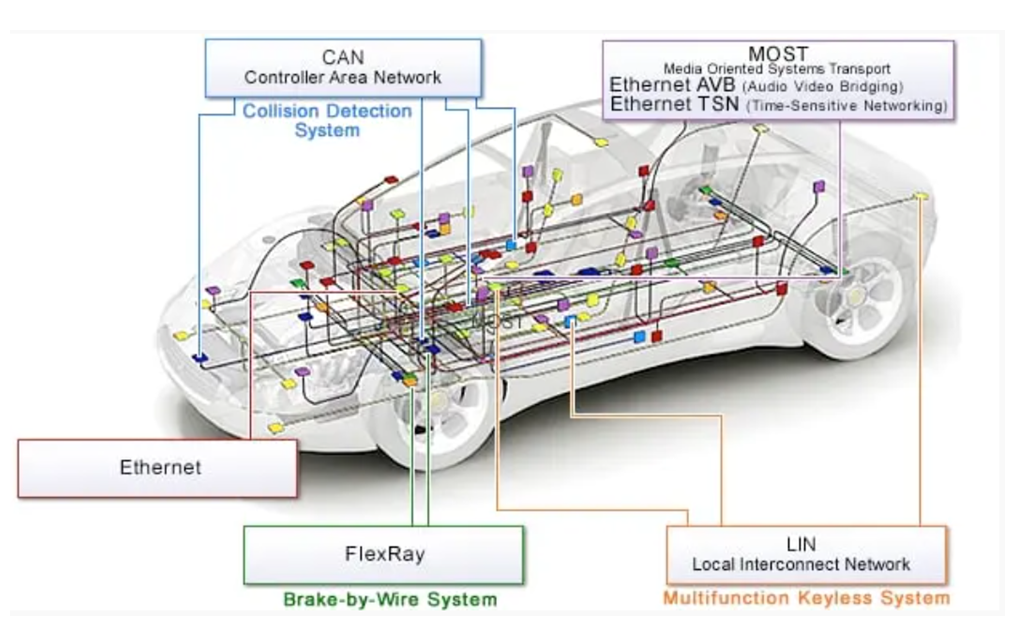
Sự kết nối giữa các Bus liên quan trên phương tiện ô tô
LIN là một giải pháp thay thế rẻ tiền cho CAN. Nó rất đơn giản nhưng nhất thiết phải giới hạn ở một nút chính và 15 nút phụ. LIN là một hệ thống nhắn tin một chiều nối tiếp, nơi các nô lệ lắng nghe các mã nhận dạng tin nhắn được gửi đến chúng.
Do hạn chế về băng thông và số lượng nút thấp hơn, LIN thường được sử dụng để điều khiển các động cơ điện nhỏ và điều khiển. LIN được giới hạn ở tốc độ dữ liệu 19,2 kbps hoặc 20 kbps.
LIN là mạng một dây được xác định bởi ISO 9141. Nó được sử dụng cho các ứng dụng băng thông thấp. Như: cửa sổ điện, đèn chiếu sáng, khóa cửa, hệ thống nhập bằng thẻ khóa, gương điện, ghế chỉnh điện, v.v.
| LIN | CAN | CAN FD | FlexRay | MOST | Ethernet | |
| Tốc độ | 10-20 kbps | 1 Mbps | 8 Mbps | 10 Mbps | 150 Mbps (chia sẻ) | 100 Mbps (Mỗi nút) |
| Kích thước dữ liệu | 8B | 8B | 64B | 254B | 370B | 1500B |
| Dây cáp | 1 dây | cặp xoắn | cặp xoắn | cặp xoắn | cặp xoắn hoặc quang | cặp xoắn |
| Kiểu nối | Bus | Bus | Bus / Sao thụ động | Bus / Sao / Hỗn hợp | vòng | Sao/Cây/Vòng |
| Phạm vi ứng dụng | Cảm biến, Bộ truyền động (đèn, gương) | Thân xe, Khung gầm, Hệ thống truyền lực | Thân xe, Hệ thống truyền lực, Điều khiển phân tán, Khung gầm | Hệ thống truyền động hiệu suất cao, Truyền động, Khung gầm | Hệ thống thông tin và giải trí | Chẩn đoán, Lập trình ECU, Thông tin và Giải trí |
| Phát hiện lỗi | 8-bit CRC | 15-bit CRC | 17 or 21-bit CRC | 24-bit CRC | CRC | 32-bit CRC |
| Chi phí | $ | $$ | $$$ | $$$ | $$ | $$ |
Như vậy, Canbus màn hình Android được hiểu nôm na là thiết bị đảm nhân nhiệm vụ quản lý và điều khiển mọi hoạt động của xe. Nhờ có Canbus đánh lái là gì? Mà hệ thống nhân diện được những lỗi tín hiệu. Giúp cho quá trình kiểm tra sữa chữa diễn ra khoa học hơn, nhanh chóng hơn.
Mỗi một dòng xe sẽ được trang bị thiết bị canbus LED là gì riêng biệt. Chẳng hạn như có canbus Fadil, canbus camera 360… Nhìn chung, thiết bị canbus đánh lái này thuộc về hệ thống quản trị và điều hành của xe. Nó được mã số hóa bằng những ký tự và con số riêng biệt mà chắc chắn người dùng sẽ khó hình dung hoặc có thể can thiệp tác động vào. Do đó, bất cứ khi nào xe hơi của bạn phát ra cảnh báo lỗi đó là do hệ thống canbus led đang làm việc và nhắc nhở lỗi tín hiệu xe đang gặp phải. Việc bạn cần làm đó là đem xe đến ngay trung tâm sửa chữa bảo dưỡng bảo trì ô tô uy tín như tại Icar để được giúp đỡ và trợ giúp kịp thời nhé.
Qua phân tích chi tiết của bài viết đã giúp các bạn hiểu rõ hơn về lợi ích, ứng dụng và cách hoạt động củ CAN bus. Nhờ vào sự ra đời của thiết bị thông minh này đã giúp xe ô tô trở nên gọn, nhẹ với nhiều tiện ích hiện đại cho người dùng. Đội ngũ nhân viên của icar.vn luôn tự hào là địa chỉ chuyên nghiệp, hàng đầu trong lĩnh vực nghiên cứu này. Từ đó đem lại cho người dùng nhiều lợi ích bền lâu khi dùng xe ô tô.
Có thể bạn quan tâm:
